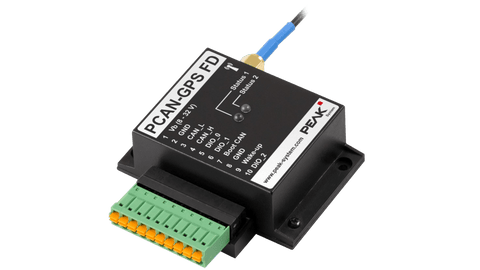
PCAN-GPS FD
Regular price£380.00 Sale price Pricing excludes VAT.Shipping cost calculated in checkout.
- Message us via the chat bubble (Mon–Fri, 9–5)
- Or give us a call on +44 (0) 1234 247176

Programmable Sensor Module with CAN FD Connection
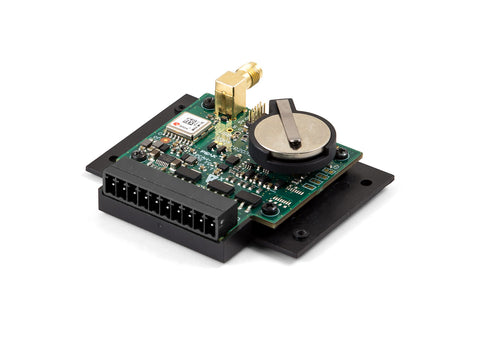
The PCAN-GPS FD is a programmable sensor module for position and orientation determination with CAN FD connection. It has a satellite receiver, a magnetic field sensor, an accelerometer, and a gyroscope. Incoming sensor data is processed by the NXP microcontroller LPC54618 and then transmitted via CAN or CAN FD.
The behavior of the PCAN-GPS FD can be programmed freely for specific applications. The firmware is created using the included development package with GNU compiler for C and C++ and is then transferred to the module via CAN. Various programming examples facilitate the implementation of own solutions.
On delivery, the PCAN-GPS FD is provided with a standard firmware that transmits the raw data of the sensors periodically on the CAN bus.
Requirements
The transfer of the firmware via CAN requires a PEAK CAN interface.
Scope of Supply
- PCAN-GPS FD in plastic casing including mating connector (Phoenix Contact FMC 1,5/10-ST-3,5 - 1952348)
- External antenna for satellite reception
- Windows® development package with GCC ARM Embedded and programming examples
- Flash program PEAK-Flash for Windows® 11 (x64/ARM64), 10 (x64) Details ...
- Manual in PDF format



