CANedge3: 2x CAN Bus Data Logger (SD + 3G/4G + GPS/IMU)
Regular price£714.00 Sale price Pricing excludes VAT.Shipping cost calculated in checkout.
- Message us via the chat bubble (Mon–Fri, 9–5)
- Or give us a call on +44 (0) 1234 247176
GENERAL
| Functionality | Standalone CAN bus data logger with SD card, 2x CAN/LIN channels, 3G/4G LTE and GNSS/IMU |
|---|---|
| Firmware | Supports free firmware updates for adding features |
| Configuration | Configuration files based on the popular open source JSON schema concept |
| Software | Free open source editor tool for easy device configuration (offline/online version available) Free open source CANcloud telematics platform for managing devices & data via your browser Multiple tools for mounting your S3 server as a local drive for easy access Free open source asammdf software & API for editing, DBC converting & plotting MF4 data Free open source MF4 converters - drag & drop log files to convert into e.g. CSV, ASC, TRC Free open source Python API - e.g. for automated data processing, reporting or integrations Free open source telematics dashboards for visualizing your DBC decoded data in your browser |
| Safety | CE-RED, FCC, IC, RoHS, ECE R10 (automotive EMC), RCM (Australia), ICASA (South Africa), KC (Korea) |
| Warranty | 1-year warranty |
| Support | Free, fast & high quality support |
| Origin | Denmark |
CAN BUS
| Channels | 2 x CAN channels (incl. CAN FD support) |
|---|---|
| Standard | ISO 11898: Compliant with CAN (up to 1 Mbit/s) and ISO & Bosch CAN FD (up to 5 Mbit/s payload rate) |
| Protocols | Log raw data from CAN based protocols (J1939/FMS, CANopen, NMEA 2000, OBD2, CAN FD, UDS, ...) |
| Identifiers | Compliant with CAN specifications 2.0A (11-Bit ID) and 2.0B (29-Bit ID) |
| Bit-Rate Auto-Detect | Bit rate can be auto-detected or set manually |
| Retransmission | Configurable retransmission of frames that have lost arbitration or been disturbed by errors |
| Transceiver Protection | ±16 kV HBM ESD, ±15 kV IEC ESD, ±70 V bus fault, short circuit Common mode input voltage: ±30 V TXD dominant timeout (prevents network blocking in the event of a failure) |
LIN BUS
| Channels | 2 x LIN channels |
|---|---|
| Publisher/Subscriber | Each LIN channel can be configured as a LIN subscriber/publisher with support for LIN data transmission |
| Custom length | Support for custom frame lengths |
| Standard | Compliant with LIN 2.0 up to 20 Kbit/s (support for Classic & Enhanced checksum format) |
| Transceiver Protection | ±8 kV HBM ESD, ±1.5 kV CDM, ±58 V bus fault TXD dominant timeout (prevents network blocking in the event of a failure) |
DATA LOGGING
| SD Card | 8 GB extractable Class 10 industrial micro SD (SDHC) included (optional 32GB) - read at 80 MB/s |
|---|---|
| Parallel CAN/LIN | Record data from up to 2 x CAN channels + 2 x LIN channels, simultaneously |
| Real-Time Clock | Yes - CAN frames are date & timestamped with 50 microsecond resolution (battery backup) The RTC can be configured to match local time zones (default: UTC) The RTC can be auto-synced via 3G/4G LTE or a CAN message (e.g. from the internal GNSS timestamp) |
| Log File Format | Log data in industry standard binary MF4 (easily convert to e.g. CSV, ASC, pandas, MATLAB, ...) |
| Data Compression | Configurable embedded log file compression (~50-80% size reduction) |
| Silent Mode | Configurable silent mode: Restricted (acknowledge only) or monitoring (zero transmission) |
| Filters | 128/64 regular/extended ID filters per channel (range, mask, acceptance, rejection) |
| Prescaling | Prescale CAN frames to record e.g. by time (per X ms) or by data (e.g. if byte X or Y changes) |
| Transmit | Transmit lists of CAN frames per channel (single-shot/periodic) - e.g. for OBD2/UDS/XCP requests |
| Gateway Routing | Data from CAN1/2, LIN1/2 and CAN9 (GPS/IMU) can be routed onto CAN1/2 (with optional ID re-mapping) |
| CAN Error Frames | Support for logging CAN error frames (bit-stuffing, form, CRC, bit, acknowledgement) |
| LIN Error Frames | Support for logging LIN error frames (checksum, receive, synchronization, transmission) |
| Remote Frames (RTR) | Support for logging/transmission of remote CAN frames (RTR) |
| Cyclic Logging | Optional cyclic logging mode (oldest log file is deleted when SD card is full) |
| Advanced Triggers | Control signal lets you start/stop logging based on custom CAN IDs & data thresholds |
| CAN Heartbeat | Optionally transmit heartbeat CAN frame with device status, storage used & RTC time |
| File Split | Configurable log file split size (by size: 1-512 MB and/or by time period: 0-86400s) |
| Power Safe | 100% power safe data logging - no file corruption when disconnected |
| Unique Device ID | Each device has a globally unique ID ensuring unique log file naming |
| Data Encryption | Log files can be encrypted at rest on the SD card for security/GDPR/CCPA (incl. integrity check) |
3G/4G LTE
| SIM Slot | SIM card slot for external micro SIM cards (mid size) |
|---|---|
| SIM Card | Use your own SIM card or add the global IoT SIM with the device (with 60-90% discounted rates) Note: Verizon SIM cards are not supported |
| 3G/4G LTE Module | Professional-grade u-blox LARA-R6001D LTE Cat1 |
| Coverage | Global |
| Frequency (Bands) | 4G LTE FDD bands: 1, 2, 3, 4, 5, 7, 8, 12, 13, 18, 19, 20, 26, 28 4G LTE TDD bands: 38, 39, 40, 41 3G bands: 1, 2, 5, 8 |
| Frequency (MHz) | 4G LTE FDD: 700, 800, 850, 900, 1700, 1800, 1900, 2100, 2600 4G LTE TDD: 1900, 2300, 2600 3G: 850, 900, 1900, 2100 |
| Certifications | CANedge3: PTCRB (antenna >20 cm from device), AT&T |
| Protocol | HTTP/HTTPS: Stable and secure transfers - ideal for big data telematics |
| Over-The-Air (OTA) | Configuration & firmware over-the-air (COTA/FOTA). Configurable sync rate. Optionally disable |
| Heartbeat | If enabled, the CANedge3 periodically "checks-in" by uploading a small device status file |
| Data Upload State | Optionally disable/enable upload of log files (e.g. via over-the-air configuration) |
| Antenna | External (SMA). Can be extended or replaced by e.g. a 2-in-1 antenna (3G/4G LTE + GNSS) |
| S3 Server Interface | Upload data to your own cloud server (e.g. Amazon, Google, Azure) or self-hosted server (e.g. MinIO) |
3G/4G LTE SECURITY
| HTTPS | Data & over-the-air updates can be sent via HTTPS (TLS 1.2) for secure transfer to server |
|---|---|
| Credential Encryption | S3 server credentials can be encrypted in the config on the device SD card |
| Signed Firmware | Firmware updates are digitally signed to verify that they are from a trusted source |
| User Policies | Fully customize access rights across CANedge devices and end users through S3 policies |
GNSS & 3D IMU
| Module | Professional-grade u-blox NEO-M9V sensor module (92-channel) with built-in gyroscope and accelerometer |
|---|---|
| GNSS | Supports combinations of GPS (USA), Galileo (Europe), BeiDou (China), GLONASS (Russia) |
| Sensor Fusion (UDR) | Enhanced position precision via sensor fusion (UDR) of GNSS and 3D IMU [automotives only] Up to 3x better accuracy vs. GNSS-only receivers Extended and improved GNSS fix in GNSS hostile areas (e.g. urban environments, tunnels, ...) |
| Accuracy | Position: 2.0 m CEP (Circular Error Probable) Heading: 0.3 deg | Pitch: 0.4 deg | Roll: 0.6 deg (68% at 30 m/s) Velocity: 0.08 m/s |
| Sensitivity | Tracking/Navigation: 160 dBm | Cold starts: 148 dBm |
| Acquisition | Cold start: ~30-120 seconds from device boot |
| GNSS Antenna | Required for GNSS-based data (not for IMU) |
DATA PARAMETERS
| CAN encoding | The GNSS/IMU data is encoded as 'CAN messages' within the CANedge log files (on a separate channel) |
|---|---|
| Configuration | GNSS/IMU messages can be filtered/prescaled to enable custom message inclusion and frequency Optionally record GNSS/IMU messages only if valid |
| Signals | The module adds several GNSS/IMU signals (for a full list, see the Docs or DBC file) GNSS position: Longitude and latitude information [5 Hz] GNSS time: Precise GNSS based epoch timestamp [5 Hz] GNSS status: Fix type (NO/UDR/2D/3D/GNSS+UDR) and satellite count [5 Hz] GNSS speed: Travel speed in m/s and km/h [5 Hz] GNSS altitude: Altitude in meters [5 Hz] Attitude/orientation: Roll, pitch, heading [automotives only] [5 Hz] GNSS odometer: Distance traveled (since power on) [5 Hz] 3D IMU: Accelerometer-based acceleration (X, Y, Z) [5 Hz] Geofences: Status of the configured geofences [5 Hz] |
ELECTRICAL
| Input Supply | +7V to +32V DC via the Channel 1 DB9 (e.g. from the vehicle/machine power supply) |
|---|---|
| Power Consumption | Very low (~1 W in normal operation, ~2.5 W during 3G/4G transfer) - no risk of battery drainage |
| Protection | Reverse voltage protection on CAN-bus supply Transient voltage event protection on supply lines |
MECHANICAL
| Enclosure & Weight | Compact aluminium enclosure: 75 x 47 x 20 mm (W x L x H excl. flanges & antenna connector). 100 grams |
|---|---|
| Antennas | 3G/4G LTE antenna and GPS antenna included |
| Flanges | Flanges with 4 x M3 screw holes (head diameter < 6 mm) - see also the CANedge 'mounting kit' |
| Connector | 2 x Standard D-sub 9 (DB9) connectors (optional OBD2/J1939/... adapters) |
| Pin-Out | See the product manual for the DB9 connector pin-outs |
| Configurable Power Out | Channel 2 can be configured to supply 5V to external modules (e.g. the CANmod sensor-to-CAN modules) |
| LEDs | Logger status via 6 external LEDs: Power, CH1, CH2, Memory, LTE, GNSS |
| Temperature | Operating temperature (parts): -25degC to +70degC |
| IP Rating | IP Rating 40 (optional IP67 enclosure kit available) |
Pinout
The CANedge uses two D-sub9 connectors for supply, 2 x CAN, 2 x LIN, and 5 V output.
Front View – Hardware Version 00.03
| Pin # | Channel 1 (CH1) | Channel 2 (CH2) |
|---|---|---|
| 1 | NC | 5 V Supply Output |
| 2 | CAN 1 L | CAN 2 L |
| 3 | GND | GND |
| 4 | LIN Data 1 | LIN Data 2 |
| 5 | NC | NC |
| 6 | GND (optional) | GND (optional) |
| 7 | CAN 1 H | CAN 2 H |
| 8 | NC | NC |
| 9 | Supply & LIN1 VBAT | LIN2 VBAT |
Supply
The supply (CH1 pin 9) is used to power the device. The supply is internally protected against reverse polarity and low-energy voltage spikes.
The supply line must be protected against high-energy voltage events exceeding device limits.
GND
All GND (ground) pins are connected internally.
5 V Supply Output
The +5 V output can be used to power external devices. The power can be toggled via the device configuration.
Connecting external input power to this pin can permanently damage the device.
External protection (such as clamping diodes) must be installed if inductive loads are connected to the 5 V supply output.
CAN L / H
CAN-bus requires no common reference (ground). However, it is recommended that GND is carried along with CAN-L/H to prevent common-mode voltage from exceeding limits.
LIN VBAT
The LIN-bus positive reference supports systems operating from 4 V to 24 V.
- LIN1 VBAT: Pin is shared with the device supply
- LIN2 VBAT: Tolerates voltage spikes up to 48 V
LIN Data
LIN-bus single-wire data line referenced to LIN VBAT.
Connector Back
The antennas are connected using two SMA connectors.
The SMA connectors are fragile and should only be finger-tightened.


The plug & play 2x CAN/LIN logger records timestamped CAN data (Classical/CAN FD) to the extractable 8 GB industrial SD card.
The compact device uses 3G/4G to securely push data to your own server - with OTA update support.
The device includes GNSS/IMU, adding data like position, speed, attitude, acceleration and more.
Ideal for telematics, R&D field tests, diagnostics and predictive maintenance.
Software/APIs are 100% free & open source - with no subscription fees or vendor lock-in.
Incl. LTE/GPS antenna.
Connector front
Pinout
The CANedge uses two D-sub9 connectors for supply, 2 x CAN, 2 x LIN, and 5 V output.
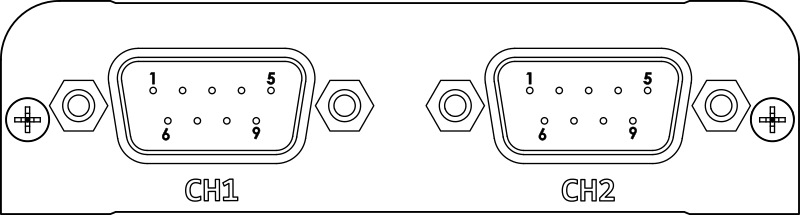
Front view. Hardware version 00.03.
| Pin # | Channel 1 (CH1) | Channel 2 (CH2) |
|---|---|---|
| 1 | NC | 5 V Supply Output |
| 2 | CAN 1 L | CAN 2 L |
| 3 | GND | GND |
| 4 | LIN Data 1 | LIN Data 2 |
| 5 | NC | NC |
| 6 | GND (optional) | GND (optional) |
| 7 | CAN 1 H | CAN 2 H |
| 8 | NC | NC |
| 9 | Supply & LIN1 VBAT | LIN2 VBAT |
Wiring example
The example illustrates how the CANedge CAN-bus 1 (channel 1) can be connected.

GENERAL
| Functionality | Standalone CAN bus data logger with SD card, 2x CAN/LIN channels, 3G/4G LTE and GNSS/IMU |
|---|---|
| Firmware | Supports free firmware updates for adding features |
| Configuration | Configuration files based on the popular open source JSON schema concept |
| Software | Free open source editor tool for easy device configuration (offline/online version available) Free open source CANcloud telematics platform for managing devices & data via your browser Multiple tools for mounting your S3 server as a local drive for easy access Free open source asammdf software & API for editing, DBC converting & plotting MF4 data Free open source MF4 converters - drag & drop log files to convert into e.g. CSV, ASC, TRC Free open source Python API - e.g. for automated data processing, reporting or integrations Free open source telematics dashboards for visualizing your DBC decoded data in your browser |
| Safety | CE-RED, FCC, IC, RoHS, ECE R10 (automotive EMC), RCM (Australia), ICASA (South Africa), KC (Korea) |
| Warranty | 1-year warranty |
| Support | Free, fast & high quality support |
| Origin | Denmark |
CAN BUS
| Channels | 2 x CAN channels (incl. CAN FD support) |
|---|---|
| Standard | ISO 11898: Compliant with CAN (up to 1 Mbit/s) and ISO & Bosch CAN FD (up to 5 Mbit/s payload rate) |
| Protocols | Log raw data from CAN based protocols (J1939/FMS, CANopen, NMEA 2000, OBD2, CAN FD, UDS, ...) |
| Identifiers | Compliant with CAN specifications 2.0A (11-Bit ID) and 2.0B (29-Bit ID) |
| Bit-Rate Auto-Detect | Bit rate can be auto-detected or set manually |
| Retransmission | Configurable retransmission of frames that have lost arbitration or been disturbed by errors |
| Transceiver Protection | ±16 kV HBM ESD, ±15 kV IEC ESD, ±70 V bus fault, short circuit Common mode input voltage: ±30 V TXD dominant timeout (prevents network blocking in the event of a failure) |
LIN BUS
| Channels | 2 x LIN channels |
|---|---|
| Publisher/Subscriber | Each LIN channel can be configured as a LIN subscriber/publisher with support for LIN data transmission |
| Custom length | Support for custom frame lengths |
| Standard | Compliant with LIN 2.0 up to 20 Kbit/s (support for Classic & Enhanced checksum format) |
| Transceiver Protection | ±8 kV HBM ESD, ±1.5 kV CDM, ±58 V bus fault TXD dominant timeout (prevents network blocking in the event of a failure) |
DATA LOGGING
| SD Card | 8 GB extractable Class 10 industrial micro SD (SDHC) included (optional 32GB) - read at 80 MB/s |
|---|---|
| Parallel CAN/LIN | Record data from up to 2 x CAN channels + 2 x LIN channels, simultaneously |
| Real-Time Clock | Yes - CAN frames are date & timestamped with 50 microsecond resolution (battery backup) The RTC can be configured to match local time zones (default: UTC) The RTC can be auto-synced via 3G/4G LTE or a CAN message (e.g. from the internal GNSS timestamp) |
| Log File Format | Log data in industry standard binary MF4 (easily convert to e.g. CSV, ASC, pandas, MATLAB, ...) |
| Data Compression | Configurable embedded log file compression (~50-80% size reduction) |
| Silent Mode | Configurable silent mode: Restricted (acknowledge only) or monitoring (zero transmission) |
| Filters | 128/64 regular/extended ID filters per channel (range, mask, acceptance, rejection) |
| Prescaling | Prescale CAN frames to record e.g. by time (per X ms) or by data (e.g. if byte X or Y changes) |
| Transmit | Transmit lists of CAN frames per channel (single-shot/periodic) - e.g. for OBD2/UDS/XCP requests |
| Gateway Routing | Data from CAN1/2, LIN1/2 and CAN9 (GPS/IMU) can be routed onto CAN1/2 (with optional ID re-mapping) |
| CAN Error Frames | Support for logging CAN error frames (bit-stuffing, form, CRC, bit, acknowledgement) |
| LIN Error Frames | Support for logging LIN error frames (checksum, receive, synchronization, transmission) |
| Remote Frames (RTR) | Support for logging/transmission of remote CAN frames (RTR) |
| Cyclic Logging | Optional cyclic logging mode (oldest log file is deleted when SD card is full) |
| Advanced Triggers | Control signal lets you start/stop logging based on custom CAN IDs & data thresholds |
| CAN Heartbeat | Optionally transmit heartbeat CAN frame with device status, storage used & RTC time |
| File Split | Configurable log file split size (by size: 1-512 MB and/or by time period: 0-86400s) |
| Power Safe | 100% power safe data logging - no file corruption when disconnected |
| Unique Device ID | Each device has a globally unique ID ensuring unique log file naming |
| Data Encryption | Log files can be encrypted at rest on the SD card for security/GDPR/CCPA (incl. integrity check) |
3G/4G LTE
| SIM Slot | SIM card slot for external micro SIM cards (mid size) |
|---|---|
| SIM Card | Use your own SIM card or add the global IoT SIM with the device (with 60-90% discounted rates) Note: Verizon SIM cards are not supported |
| 3G/4G LTE Module | Professional-grade u-blox LARA-R6001D LTE Cat1 |
| Coverage | Global |
| Frequency (Bands) | 4G LTE FDD bands: 1, 2, 3, 4, 5, 7, 8, 12, 13, 18, 19, 20, 26, 28 4G LTE TDD bands: 38, 39, 40, 41 3G bands: 1, 2, 5, 8 |
| Frequency (MHz) | 4G LTE FDD: 700, 800, 850, 900, 1700, 1800, 1900, 2100, 2600 4G LTE TDD: 1900, 2300, 2600 3G: 850, 900, 1900, 2100 |
| Certifications | CANedge3: PTCRB (antenna >20 cm from device), AT&T |
| Protocol | HTTP/HTTPS: Stable and secure transfers - ideal for big data telematics |
| Over-The-Air (OTA) | Configuration & firmware over-the-air (COTA/FOTA). Configurable sync rate. Optionally disable |
| Heartbeat | If enabled, the CANedge3 periodically "checks-in" by uploading a small device status file |
| Data Upload State | Optionally disable/enable upload of log files (e.g. via over-the-air configuration) |
| Antenna | External (SMA). Can be extended or replaced by e.g. a 2-in-1 antenna (3G/4G LTE + GNSS) |
| S3 Server Interface | Upload data to your own cloud server (e.g. Amazon, Google, Azure) or self-hosted server (e.g. MinIO) |
3G/4G LTE SECURITY
| HTTPS | Data & over-the-air updates can be sent via HTTPS (TLS 1.2) for secure transfer to server |
|---|---|
| Credential Encryption | S3 server credentials can be encrypted in the config on the device SD card |
| Signed Firmware | Firmware updates are digitally signed to verify that they are from a trusted source |
| User Policies | Fully customize access rights across CANedge devices and end users through S3 policies |
GNSS & 3D IMU
| Module | Professional-grade u-blox NEO-M9V sensor module (92-channel) with built-in gyroscope and accelerometer |
|---|---|
| GNSS | Supports combinations of GPS (USA), Galileo (Europe), BeiDou (China), GLONASS (Russia) |
| Sensor Fusion (UDR) | Enhanced position precision via sensor fusion (UDR) of GNSS and 3D IMU [automotives only] Up to 3x better accuracy vs. GNSS-only receivers Extended and improved GNSS fix in GNSS hostile areas (e.g. urban environments, tunnels, ...) |
| Accuracy | Position: 2.0 m CEP (Circular Error Probable) Heading: 0.3 deg | Pitch: 0.4 deg | Roll: 0.6 deg (68% at 30 m/s) Velocity: 0.08 m/s |
| Sensitivity | Tracking/Navigation: 160 dBm | Cold starts: 148 dBm |
| Acquisition | Cold start: ~30-120 seconds from device boot |
| GNSS Antenna | Required for GNSS-based data (not for IMU) |
DATA PARAMETERS
| CAN encoding | The GNSS/IMU data is encoded as 'CAN messages' within the CANedge log files (on a separate channel) |
|---|---|
| Configuration | GNSS/IMU messages can be filtered/prescaled to enable custom message inclusion and frequency Optionally record GNSS/IMU messages only if valid |
| Signals | The module adds several GNSS/IMU signals (for a full list, see the Docs or DBC file) GNSS position: Longitude and latitude information [5 Hz] GNSS time: Precise GNSS based epoch timestamp [5 Hz] GNSS status: Fix type (NO/UDR/2D/3D/GNSS+UDR) and satellite count [5 Hz] GNSS speed: Travel speed in m/s and km/h [5 Hz] GNSS altitude: Altitude in meters [5 Hz] Attitude/orientation: Roll, pitch, heading [automotives only] [5 Hz] GNSS odometer: Distance traveled (since power on) [5 Hz] 3D IMU: Accelerometer-based acceleration (X, Y, Z) [5 Hz] Geofences: Status of the configured geofences [5 Hz] |
ELECTRICAL
| Input Supply | +7V to +32V DC via the Channel 1 DB9 (e.g. from the vehicle/machine power supply) |
|---|---|
| Power Consumption | Very low (~1 W in normal operation, ~2.5 W during 3G/4G transfer) - no risk of battery drainage |
| Protection | Reverse voltage protection on CAN-bus supply Transient voltage event protection on supply lines |
MECHANICAL
| Enclosure & Weight | Compact aluminium enclosure: 75 x 47 x 20 mm (W x L x H excl. flanges & antenna connector). 100 grams |
|---|---|
| Antennas | 3G/4G LTE antenna and GPS antenna included |
| Flanges | Flanges with 4 x M3 screw holes (head diameter < 6 mm) - see also the CANedge 'mounting kit' |
| Connector | 2 x Standard D-sub 9 (DB9) connectors (optional OBD2/J1939/... adapters) |
| Pin-Out | See the product manual for the DB9 connector pin-outs |
| Configurable Power Out | Channel 2 can be configured to supply 5V to external modules (e.g. the CANmod sensor-to-CAN modules) |
| LEDs | Logger status via 6 external LEDs: Power, CH1, CH2, Memory, LTE, GNSS |
| Temperature | Operating temperature (parts): -25degC to +70degC |
| IP Rating | IP Rating 40 (optional IP67 enclosure kit available) |



